La nouvelle expérience de ravitaillement robotique (RRM) de la NASA est un dispositif de démonstration de technologie révolutionnaire - apporté par la mission finale de la navette - qui testera et prouvera si les vaisseaux spatiaux en orbite terrestre existants qui n'ont jamais été destinés à être entretenus peuvent être ravitaillés et réparés avec succès par robot.
La charge utile RRM est une expérience de recherche de cheminement de pointe qui promet d'ouvrir de nouvelles voies passionnantes de recherche en science des stations qui pourraient potentiellement sauver et prolonger la durée de vie des satellites commerciaux, gouvernementaux et militaires en orbite d'une valeur de milliards de dollars.
RRM a été livré à la Station spatiale internationale (ISS) par l'équipage de quatre personnes du STS-135, la grande finale des navettes. Le projet est un effort conjoint de la NASA et de l'Agence spatiale canadienne (ASC).
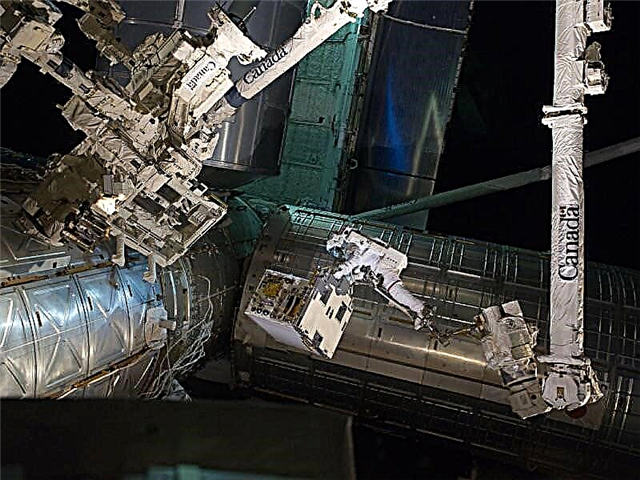
Au cours de la toute dernière sortie dans l'espace de la navette spatiale, RRM a été temporairement installé par les astronautes américains Mike Fossum et Ron Garan sur une plate-forme du robot Dextre - le manipulateur habile à usage spécial - qui fonctionne comme un "bricoleur" dans l'espace.
Dextre est un robot à deux bras fourni par CSA qui est également un élément clé de l'expérience car il permet l'exécution de tâches de réparation et d'entretien au cœur de l'expérience RRM.

L'unité de la taille d'une machine à laver pèse 500 livres et a été cachée à l'intérieur de la baie de charge utile de la navette spatiale Atlantis et attachée au transporteur polyvalent léger (LMC) pour le voyage aller simple dans l'espace.
Après le départ d'Atlantis, RRM sera transféré à un point d'attache permanent sur la ferme des stations et monté sur le transporteur logistique extérieur 4 (ELC-4) de l'avant-poste en orbite d'un million de livres.
Selon Justin Cassidy, RRM Hardware Manager au NASD Goddard Spaceflight, RRM est la toute première démonstration technologique de la NASA destinée à tester la faisabilité d'opérations d'entretien en orbite sur des satellites qui n'ont jamais été construits pour être travaillés et entretenus après avoir décollé dans l'espace. Centre à Greenbelt, Maryland.
Le boîtier RRM simulera à la fois le satellite à entretenir et les techniques de maintenance requises pour effectuer à la fois le ravitaillement robotique et les travaux de réparation.

"Le robot Dextre manipulera quatre" outils "spécialement conçus stockés dans des baies à l'intérieur du RRM", a déclaré Cassidy dans une interview au Kennedy Space Center.
À l'aide d'une maquette RRM haute fidélité - surnommée «Rosie» - exposée au Kennedy Space Center Press Site, Cassidy m'a parlé en détail de la mission et des objectifs de RRM.
Les quatre outils RRM uniques ont un héritage dans les missions de service Hubble et ont été développés chez NASA Goddard; L'outil de manipulation de coupe-fil et de couverture, l'outil multifonction, l'outil de retrait du capuchon de sécurité et l'outil de buse.
"Dextre saisira les outils et les déplacera avec ses" mains "pour effectuer des tâches de ravitaillement et de maintenance sur les cartes d'activité et les composants satellites simulés montés sur les murs extérieurs du RRM", m'a dit Cassidy. «Les tableaux d'activités pourront être remplacés à l'avenir pour réaliser de nouvelles expériences.»

L'affectation RRM marque la première utilisation de Dextre au-delà des tâches de maintenance de routine à bord de l'ISS. En effet, le projet de recherche en collaboration avec RRM est en fait une nouvelle fonction de R & D au-delà de ce qui était initialement prévu et envisagé pour Dextre, a déclaré Mathieu Caron, gestionnaire des opérations de mission de l'ASC.
Les tâches prévues pour RRM comprennent le travail et la manipulation des bouchons, vannes et vis de formes et tailles variées, la coupe des fils, le réglage des couvertures thermiques et le transfert de fluides autour des réservoirs de carburant. L'éthanol sera utilisé pour simuler l'écoulement du carburant hydrazine, a déclaré Cassidy.
«RRM sera exploité par des contrôleurs au sol à la NASA Goddard, au Marshall Space Flight Center de Huntsville, en Alberta, ainsi qu'au Canada par l'Agence spatiale canadienne», a expliqué Cassidy.
Chaque outil RRM est équipé de caméras intégrées abritant six DEL intégrées pour aider les contrôleurs au sol à guider précisément les outils.
«La phase d'expérimentation RRM visant à démontrer les opérations de ravitaillement robotique et de maintenance à l'ISS devrait durer deux ans et pourrait durer peut-être dix ans ou plus», a déclaré Cassidy.
Le président Obama a interrogé l'équipage du STS-135 sur l'expérience RRM lors d'un appel téléphonique du bureau ovale de la Maison Blanche à l'ISS. Regardez l'appel téléphonique d'Obama sur YouTube
La NASA espère que le petit investissement dans la démonstration de la technologie RRM ouvrira la voie à des missions de suivi avancées et au développement privé de véhicules de ravitaillement et d'entretien robotiques commerciaux - dans un avenir pas trop lointain - qui rapporteront des milliards de dollars d'économies et de dividendes.





Lisez mes fonctionnalités sur la mission Final Shuttle, STS-135:
Récupération des trompettes Water Cannon Salute des propulseurs à fusée solide Last Shuttle - Album photos
La navette Atlantis s'envole pour la dernière fois dans Space: Album photos
Atlantis dévoilé pour son dernier vol historique dans un temps orageux
Compte à rebours jusqu'à la dernière navette; Temps orageux prévu
Atlantis Crew Jets en Floride le jour de l'indépendance pour le dernier décollage de la navette
La NASA organise le 8 juillet pour la grande finale obligatoire de la navette spatiale
Final Shuttle Voyagers effectue un compte à rebours sur la rampe de lancement en Floride
Charge utile finale pour le dernier vol de la navette livrée à la rampe de lancement
Last Ever Shuttle Journeys sur la rampe de lancement; Galerie de photos
Atlantis passe à la verticale pour la dernière fois
Atlantis s'installe dans un bâtiment d'assemblage de véhicules avec l'équipage final de la navette spatiale pour le 8 juillet